




1. Introduction
Currently, less than 24% of the global ocean floor has been well mapped (Seabed 2030 Project, 2022), with less than 11% constrained by shipboard soundings (Tozer et al., 2019). Accurately mapping the topography of the ocean basins is critical not only for marine scientists but also for stakeholders in industries as diverse as shipping, fisheries, resource exploration, marine engineering and infrastructure, ecotourism and conservation. Several high-level initiatives have highlighted the importance of improving bathymetry including the Nippon Foundation-GEBCO Seabed 2030 Project and the United Nations Decade of Ocean Science for Sustainable Development (2021-2030). High priority regions for improved bathymetric data are remote regions that are difficult, time-consuming, or expensive to access with survey vessels. There are many gaps that remain to be filled, including those in the deep oceans, polar regions, coastal waters shallower than 200m depth and the sparsely observed sectors of the major ocean basins.
2. The Argo array of profiling floats
The Argo program is a global array of free-drifting, autonomous profiling floats that measure water properties (pressure, temperature and salinity; P,T,S) between a ‘profile’ depth (typically 2000m) and the surface every 10 days. In between profiles, the floats drift at a ‘park’ depth for 9 days collecting information on water properties and ocean currents. When the floats reach the surface, they telemeter data to one of 11 national data centres that process the data, provide quality assurance, and distribute the data to two global data assembly centres (GDACs). The GDACs are the long-term data repositories for the global Argo dataset and the data is made publicly available within 24 hours (for the real-time data stream) and within 12 months (for the climate-quality, delayed-mode data stream).
The Argo program began more than two decades ago with the first deployments of 2000m-rated floats in 1999. The primary objectives of the Argo program are to: (i) measure ocean variability over seasonal to decadal timescales, (ii) provide data to calibrate satellite-based observations and (iii) deliver information to help constrain climate models (Freeland et al., 2010). The Argo profiling float array has revolutionised the field of oceanography by providing continuous observations of the global oceans for the first time. Argo data allows us to track how the ocean is changing and therefore how the planet is warming (given that 93% of the extra energy stored by Earth from 1971 to 2010 is found in the ocean (Rhein et al., 2013)). Globally, more than 2.7 million Argo profiles have been collected (Argo, 2022). Core Argo floats typically drift (or ‘park’) at 1000m and profile to 2000m water depth. Biogeochemical (BGC) Argo floats are also rated to 2000m and carry the core P,T,S, sensors along with additional sensors such as dissolved oxygen, pH, fluorescence and nitrate. In 2012–2014, a new Deep Argo array began with the deployments of prototype floats that could measure to 6000m. A number of different deep float models have been deployed with some models diving to 4000m depth (e.g. Deep Ninja, Deep Arvor floats) and others diving to 6000m (e.g. Deep APEX, Deep SOLO floats).
The core Argo mission is to sample the upper 2000m of the water column. However, when the floats drift into shallower regions, or encounter ridges or seamounts, they can ground on the seabed and in the process record a measurement of the water depth. While grounding can occasionally damage sensitive oceanographic sensors, or trap floats on the sea floor for weeks or even months, the vast majority of float/sea bed encounters are uneventful, and the float continues on, unscathed. The 6000 m Deep floats were designed to measure the entire water column and some have a passive bottom detection system that allows the floats to reach within a few metres of the seafloor. The single-point measurements of water pressure (and therefore depth) that the floats collect while grounded could potentially be a valuable contribution to improving global bathymetry.
3. Spatial Distribution
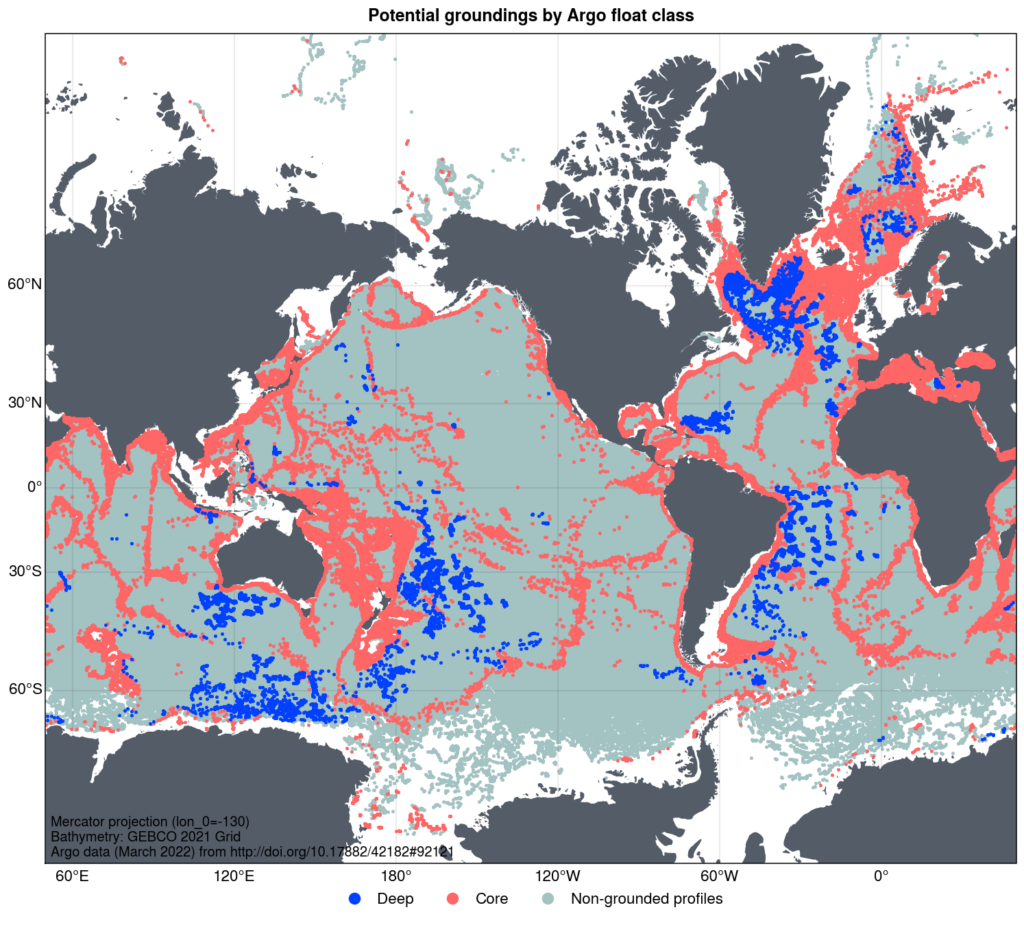
The Argo array comprises 3967 operational floats (as of March 2022), with the design goal to maintain a global array of 4600 floats. Up to 8% of core Argo profiles are from floats that have drifted into waters shallower than 2000m and are potentially grounded. The distribution of these potentially grounded Argo profiles is shown in Figure 1. The objectives of the Deep Argo program are to deploy and maintain a target of around 1250 deep floats in a global 5° x 5° array (Johnson et al, 2019). Nearly 200 Deep floats (collecting around 20,000 profiles to date) have been deployed in several pilot arrays in the southwest Pacific, Australian Antarctic Basin, the Brazil Basin and in the North Atlantic (Figure 1). Apart from an early series of shallow test dives straight after deployment, deep floats often sample to the seabed. The Deep Argo array is still in the early stages with pilot deployments in specific basins, however we expect the utility of the data for bathymetric purposes will scale up as the array expands over time.
4. Bathymetry from Argo Project
The Argo Bathymetry project will investigate whether grounded Argo data can be used to inform bathymetry, and is a collaborative effort by researchers from CSIRO and the University of Tasmania (supported by the Australian Hydrographic Office and the International Hydrographic Organization). The authors are also part of an international Deep Argo Bathymetry Task Team that is focused on extracting grounded profile information from the Deep Argo dataset. This project aims to provide a ‘proof-of-concept’ by validating grounded profiles from the Argo array and to estimate the associated vertical and horizontal uncertainties.
Determining whether an Argo profile has grounded is not quite as straightforward as one might expect. There are many kinds of float models that operate in a variety of ways and have different types of firmware (float software). Some floats profile first on descent to a programmed deep ‘profile’ depth and then ascend to complete their shallower drift or ‘park’ phase. Other floats complete the drift phase first, and then descend to a profile depth, before profiling on the ascent. Argo floats do not have an altimeter or echosounder and therefore do not record contact with the bottom directly. Some floats use a lack of a change in pressure as a proxy for grounding, i.e. the float tries to descend to its pre-programmed depth, and then, if after making a buoyancy adjustment for a specific time window and no further descent has occurred, the float ‘assumes’ it has grounded and transitions to the next phase of the float cycle. Some of these profiles will have grounded, but in other cases, float buoyancy issues can prevent the float from descending to its pre-programmed depth and this can be incorrectly interpreted by the float firmware (or by an operator in post-processing) as grounding, when it did not. These cases need to be identified to ensure false positives are removed from the dataset. Conversely, false negatives also need to be identified. Most of the older float models did not record grounding events in the data files. Many of the newer float types do record a grounding event in the log files, however this data is not always transferred to the Argo files available on the GDAC’s, with those records essentially ‘lost’ to the community.
Some float firmware only records groundings that occur during a particular phase of the float cycle, i.e. during the descent to profile depth. If the grounding occurred during an earlier part of the float cycle, i.e. during descent to park depth, then the grounding is not recorded. This matters, because where the grounding occurs in the float cycle determines how close in time (and space) the surface GPS fix is, and therefore the location that is assigned to the grounding. Data from profiles that ground during the descent to profile depth are typically close to a GPS fix, as are profiles that ground during the descent to park depth. However, if the float grounds midway during the ‘park’ or drift phase, then the grounding point may be up to 5 days distant from a surface fix and therefore unlikely to reflect the bathymetry at the location the float reports. Knowledge of the float behaviour (through an inspection of the mission parameters for the float, i.e. the pre-programmed park and profile depths) and then a comparison of depths attained by the float at various points in the float cycle can all help to determine if (and when) a grounding occurred. An inspection of the trajectory data plus information on critical timing points in the float cycle can also help determine at what phase in the cycle the grounding occurred and how long the displacement period was between grounding and GPS fix.
For floats with Iridium communications, park and profile depths can be changed from cycle to cycle by the float operators. These changes in float mission may happen in accordance with scientific objectives or a change in conditions (e.g. the onset of winter sea ice). Mission changes should be updated in the float metadata but this doesn’t always happen, and some critical float data can be missing or incorrectly populated. One of the aims of this project is to understand how each float model behaves and what data and timing points are critical for identifying groundings. We can then provide feedback to data centers so that this information can be correctly populated in the files. Another project objective is to compile a ‘best practice’ guide to identify groundings to make this process easier for data centres and float operators to extract in future.
5. Vertical and Horizontal Uncertainties
Initial results from a comparison of a small subset of float profiles grounded on the continental shelf with high resolution multibeam bathymetry show good agreement (Figure 2). The vertical uncertainty of the float data (maximum profile depth minus bathymetry) has a median value of 12.6 m with an interquartile range (IQR) of -11.5 to 24.3m. The small positive bias overall means the floats are generally measuring depths slightly shallower than the bathymetry. An initial estimate of horizontal uncertainties for these profiles based on float drift speeds is also promising. Using mean drift speeds between float profiles of 0.9 to 1.7cm.s-1 results in a median horizontal error of 76m (IQR= 40-93m) and using maximum drift speeds between float profiles of 3.4 to 7.5cm.s-1 results in median horizontal errors of 330m (IQR=310-662m). This batch of floats was programmed to park on the seafloor during the drift phase resulting in less movement between profiles when compared to regular free-drifting Argo floats. Therefore horizontal errors for the wider array are likely to be larger. We expect that the horizontal uncertainties of the grounding estimates will also vary depending on the flow regime (i.e. smaller displacements between the grounding point and surface GPS fix for floats in quiescent flow regimes). Work is now underway through this project to estimate the vertical and horizontal errors for the wider grounded Argo dataset.
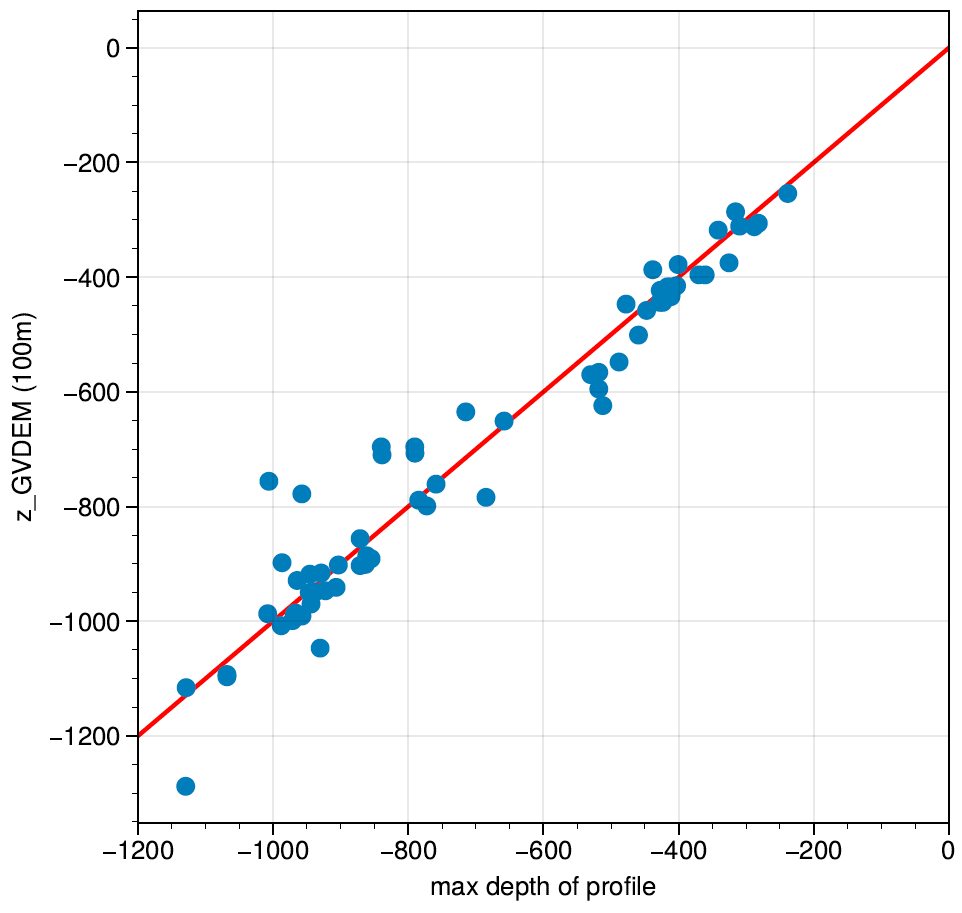
Note that these results are adapted from those reported in Wallace et al. (2020) with two differences (i) here we use only float profiles with GPS fixes and exclude the few locations with Iridium positions (due to the larger uncertainties) and (ii) we use the 0.001-arcdegree (~100m) resolution digital elevation model from Beaman et al. 2020 for the depth comparisons (instead of the ~500m DEM).
6. Conclusions
In an ideal world, multibeam surveys would be extended to all of the unobserved global oceans in order to obtain the best possible bathymetry. However, the time and resources needed to do this are not practical or cost-effective on a global scale. The number of potentially-grounded Argo profiles may seem relatively small in comparison to the terabytes of data collected during a multibeam survey. However, given there are still large areas of the ocean that have not been well mapped, the Argo dataset of grounded profiles may be able to help fill some of these gaps. While the Argo array was founded with an entirely different set of scientific objectives, it may also prove to be useful for improving bathymetry. This is a purpose that was certainly not anticipated by the founders of the Argo program but one that may prove to be of value to both the oceanographic and hydrographic communities.
7. Acknowledgements
This project received funding from the Australian Hydrographic Office, Australian Government.
8. References
Argo (2022). Argo float data and metadata from Global Data Assembly Centre (Argo GDAC). SEANOE. https://doi.org/10.17882/42182
Freeland, H. J., Roemmich, D., Garzoli, S. L., Le Traon, P. Y., Ravichandran, M., Riser, S., et al. (2010). “Argo – a decade of progress,” inof OceanObs’09: Sustained Ocean Observations and Information for Society, eds J. Hall, D. E. Harrison, and D. Stammer (Mangere: ESA Publications). doi: 10.5270/OceanObs09.cwp.32
Johnson, G.C., Purkey, S.G., Zilberman, N.V. & Roemmich, D. (2019). Deep Argo quantifies bototm water warming rates in the Southwest Pacific Basin. Geophysical Research Letters, 46, 2662-2669. https://doi.org/10.1029/2018GL081685
Rhein, M., Rintoul, S. R., Aoki, S., Campos, E., Chambers, D., Feely, R. A., Gulev, S., Johnson, G. C., Josey, S. A., Kostianoy, A., Mauritzen, C., Roemmich, D., Talley, L. D., & Wang, F. (2013). Observations: Ocean. In T. F. Stocker et al. (Eds.), Climate change 2013: The physical science basis. Contribution of working group I to the fifth assessment report of the Intergovernmental Panel on Climate Change (pp. 255– 316). Cambridge, United Kingdom and New York: Cambridge University Press. https://doi.org/10.1017/CBO9781107415324.010
Tozer, B, Sandwell, D. T., Smith, W. H. F., Olson, C., Beale, J. R., & Wessel, P. (2019). Global bathymetry and topography at 15 arc sec: SRTM15+. Earth and Space Science. 6. https://doi.org/10.1029/2019EA000658
Seabed 2030. [29 Jun 2022]. https://seabed2030.org/news/seabed-2030-announces-increase-ocean-data-equating-size-europe-and-major-new-partnership-un
Wallace, L. O., van Wijk, E. M., Rintoul, S. R., & Hally, B. (2020). Bathymetry constrained navigation of Argo floats under sea ice on the Antarctic continental shelf. Geophysical Research Letters, 47, e2020GL087019. https://doi.org/10.1029/2020GL087019