

Abstract
1 Introduction
The demand for the use of Global Navigation Satellite System (GNSS) geotechnology has increased greatly over the last decades, mainly due to the applicability of the Global Positioning System (GPS) in smartphone devices. Developed and operated by the Government of the United States of America (USA), it is a system for global positioning by means of satellite radio navigation, being the first to come into operation and possessing a constellation of 31 satellites (IBGE, 2022). According to Instituto Brasileiro de Geografia e Estatística (IBGE, 2022), the system is widely used in several areas such as aviation, land and sea navigation, precision agriculture, topographic and geodetic mapping, among other uses.
In the beginning, the signals that were emitted by the GPS satellites were in the bands L1 C/A (Coarse Acquisition), L1 P(Y) and L2 P(Y). Over the years, more modern units were launched and the development of the system in the space segment was due to the transmission of signals from new satellites, with the consequent improvement in positioning quality (Segantine, 2005; Leick et al., 2015). Simultaneously, the other parts of the system were also updated and with that, topographic receivers are currently able to generate the L1 carrier phase and its code. In addition, if greater accuracy is needed in the positioning of points, users have geodetic receivers that allow the generation of the signal in the L1 and L2 or L1, L2 and L5 frequencies (Negri, 2018).
A great advantage of devices with two or more frequencies, is the possibility of performing combinations between the observables of different carriers. Once combined, these data serve as an improvement for further application of ionospheric and tropospheric models during data processing. Likewise, it is also possible to determine the multipath of signals when the observables of L1 and L2 carriers are combined.
Today, some smartphone and tablet devices, in their latest versions and equipped with low-cost GNSS micro receivers, have the ability to track the GPS signal and generate the L1 and L5 carrier observables. However, there are still some limitations to be overcome so that mobile devices can be used with greater reliability in Geomatics work. Today, we can list: the duty cycling process and antennas with little capacity to attenuate the multipath effect of the signal, as being the main causes of the low quality of the measurements (Negri, 2018).
As geodetic receivers for high precision positioning use components with high technology, there is a problem of high acquisition costs. Within the scope of the Diretoria de Hidrografia e Navegação (DHN), this problem has been compounded by the existence of few units of this type of equipment. In view of the above, the present work aims to analyze the feasibility and limitations of using mobile devices equipped with GNSS receivers as high-precision positioners.
2 Methodology and material
2.1 Actions taken in the field
The data used in the present work were collected at five landmarks along the Complexo Naval da Ponta da Armação (CNPA) and on two points of easy visualization by satellite or aerial images (Fig. 1). Among the points, four have their respective planialtimetric station description forms (F-21) completed and available for consultation on the Centro de Hidrografia da Marinha (CHM) website, while three of the points, one of which has already been established by Marco Testemunho, do not have an F-21 registered. Data collection involved, a Galaxy S20+ smartphone, with an Android operating system and equipped with a GNSS micro receiver, and a high-precision geodetic GNSS receiver Reach RS2 from the Emlid brand, provided by the Centro de Instrução e Adestramento Almirante Radler de Aquino (CIAARA).
The collection method for the cell phone obeyed the following criteria in order to mitigate errors: an iron plate was positioned below the device to minimize the effects of multipath signals; the center of the cell phone was positioned coincident with the center of the point to be tracked; two wooden boards served as spacers between the cell phone and the metal panel, since direct contact with aluminum would impair signal reception; the device’s screen was facing upwards, as it could not be turned off during tracking; and data collection at each point took approximately 10 minutes1. Below is a representative figure of the method employed (Fig. 2).
The collection method for the RS2 receiver complied with the following criteria in order to mitigate errors: use of a bipod to facilitate positioning over the center of the points to be tracked; equipment leveling with the use of a bubble level and existing adjustments on the bipod; tracking during clear skies; real-time corrections through Networked Transport of RTCM via Internet Protocol (NTRIP) of the Brazilian Network for Continuous Monitoring of GNSS Systems; and data collection at each point took approximately 10 minutes2. Below is a representative figure of the method employed (Fig. 3).



2.2 Application Geo++ RINEX Logger
Dual-frequency GNSS data (L1 and L5) were obtained using a Receiver Independent Exchange Format (RINEX) file, generated by the Geo++ RINEX Logger application version 2.1.6, available for download on the Google Play Store.
The Geo++ RINEX Logger employs the latest Android Application Programming Interface (API) services to log the device’s raw GNSS measurement data to a RINEX 3.04 format file, including pseudo-divisions, accumulated delta intervals, doppler frequencies and noise values. So far, the application supports GPS/ GALILEO/ GLONASS/ QZSS/ BDS services for carrier phases L1/ L5/ E1B/ E1C/ E5A, according to the possibility of identifying these by the smartphone antenna.
RINEX files are generated according to the time and date of the observations, and at the end, they are registered in the directory inside the root of the internal storage of the cell phone.
2.3 RBMC-IP SERVICE
In May 2009, the Instituto Brasileiro de Geografia e Estatística (IBGE) made available to users of GNSS equipment with wireless internet access, a free service that allows the collection of more precise coordinates during surveys.
According to IBGE (2008), the RBMC-IP service consists of sending, in real time over the internet, the observations collected at 26 of the 80 stations of the Rede Brasileira de Monitoramento Contínuo of GNSS systems (RBMC) spread throughout Brazil. In addition to wireless internet access, users need trackers and software that apply real-time corrections transmitted by reference stations (RBMC-IP). Thus, the GNSS observations collected by the receiver are applied to the data received via the internet, which makes it possible to obtain accuracy at the level of decimeters for the use of DGPS, or even of centimeters, if RTK is applied. All results obtained by the RBMC-IP service are automatically referenced to SIRGAS 2000, adopted as the official reference system in Brazil since 2005.
According to the IBGE (2008), corrections or data from the RBMC-IP are made available through the NTRIP protocol, which enables the simultaneous connection of several users to the IBGE server using PDAs (handheld computers), laptops and desktop computers with wireless internet access (GPRS or 3G modem).
Several advantages surround the RBMC-IP service for real-time applications. Until recently, to carry out a conventional RTK survey, a receiver installed in a station with known coordinates (base), a tracker (rover) and a UHF communication radio for data transmission was required. A limiting factor for the use of RTK is the transmission range of radio waves. The existence of terrain obstacles can impact the expected accuracy. Furthermore, as the separation between the radio channels is narrow, the signal may suffer interference from other users who are using the same frequency band (Costa et al., 2008).
The radio connection can be replaced by the RBMC-IP service via the internet, with the following advantages:
- GNSS receivers capable of carrying out RTK surveys do not require licenses, requiring only an internet connection to use the NTRIP protocol;
- Lower cost for acquiring a 3G or GSM/GPRS modem for internet connection compared to a UHF radio;
- Dismisses the installation of GNSS trackers with operator throughout the day, since the reference stations are provided by IBGE;
- Thanks to the greater reach of the internet signal compared to the radio, it is no longer necessary to install the reference station and the transmitter in high places;
- Physical obstacles no longer generate signal obstructions as observed with radio waves; and
- Working time with the use of RBMC-IP is reduced when compared to the radio method.
The only disadvantage for using the RBMC-IP service is the need for availability of wireless internet connection, either by wireless or by telephone (Costa et al., 2008).
2.4 NTRIP protocol
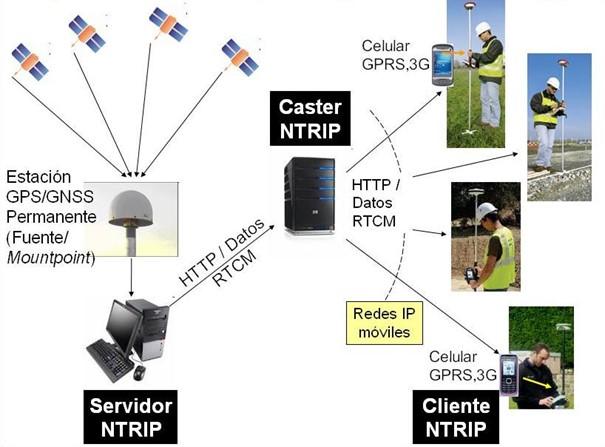
The Network Transport of RTCM via Internet Protocol (NTRIP) was developed for the transmission of differential data over the wireless Internet. Such a service allows simultaneous connections between laptop, PC, PDA or receivers with an NTRIPCaster server. This server can be accessed through IP protocol sending services, such as UMTS, EDGE, GPRS or GSM (Lenz, 2004). Likewise, the NTRIP protocol is capable of sending any GNSS data format, although the RTCM 3 format is the adopted standard for transmitting GNSS data in real time.
NTRIP was modeled to distribute GNSS data continuously to a static or mobile tracker via the internet. The increasing accessibility of internet services through mobile telephony, such as GSM, GPRS and 3G modem, was the great motivator for the development of the service (Costa et al., 2008).
According to Chen et al. (2004), NTRIP has the following structure:
- NTRIPSource – Any system that provides an uninterrupted flow of GNSS data. An example, it is a GNSS receiver transmitting RTCM data.
- NTRIPServer – Application responsible for creating a data transfer channel between the receiver (NTRIPSource) installed in a reference station and the NTRIPCaster.
- NTRIPCaster – It is a Hypertext Transfer Protocol (HTTP) server, which organizes NTRIPSource by defining mountpoints and keys for access with NTRIPClient. Briefly, it is responsible for distributing RTCM data via the Internet to each user. The NTRIPCaster must be installed, preferably, in a server of the data control center of a reference network, for example the RBMC-IP. In this Caster, information from several reference stations converges, each of which has an identifier called mountpoint. This Caster, in addition to distributing the corrections, is responsible for verifying the quality and integrity of the data received, as well as authenticating each user by login and password. Through NTRIPCaster it is possible to send: RTCM, RTK, Radio Technical Commission for Aviation Services (RTCA), DGNSS, WAAS and EGNOS corrections; ultra-fast satellite orbit data in SP3 format (Standard Product 3); data in RINEX format; and raw data from receivers (Weber et al., 2005).
- NTRIPClient – This is an application installed on a cell phone, laptop or PDA, which is connected to a receiver so that it can receive corrections transmitted by the Caster. Access to corrections is performed by selecting a mountpoint, present in the NTRIPCaster table. The receiver may be single or dual frequency. A browser can be used to scan just the code, which will receive DGPS corrections. In certain cases, the receiver can access the Caster directly, without the need for an intermediary working as a Client. An example of this case is the Emlid Reach RS2, used in this work.
In Fig. 4, the operating structure of the NTRIP protocol can be seen.
According to Costa et al. (2008), the NTRIP protocol has the following main characteristics:
- Possibility of distributing any type of GNSS data in a stream;
- It is based on HTTP;
- Requires a small bandwidth to transmit GNSS corrections (0.5 Kbps for DGPS and 5 Kbps for RTK);
- Accepts a high number of users connected simultaneously;
- Provides a stream of data over any Transfer Control Protocol/Internet Protocol (TCP/IP) mobile network; and
- Data access is performed securely, without the need to be in direct contact with reference stations.
3 Data processing and analysis
3.1 Processing of collected data
The data acquired in the field were processed with the aid of the RTKLIB 2.4.3 software, an open source program and composed of a vast library of functionalities. Thus, in order to carry out such a procedure, the RTKPOST function was used, which performs the similar procedure of programs already used in the Brazilian Navy, for example GrafNet.
Next, we highlight the reasons that led to the use of RTKLIB instead of the already used GrafNet:
- Study of the feasibility and results achieved using free software for processing GNSS data;
- Due to the non-provision of the navigation message by the tracking carried out by the cell phone, it was necessary to combine the observables with the respective navigation message from the RBMC stations close to the surveyed location. As a result, the only program that allowed such a procedure was RTKLIB, since such an attempt on GrafNet led to tracking positioning errors;
- Since the observables collected by the smartphone were only in the L1 and L5 frequencies, the RTKLIB presented itself as the best alternative, since it enabled the processing in the L1, L2 and L5 frequencies. In turn, in GrafNet it was only possible to use the L1 and L2 frequencies. Thus, if the latter were chosen, serious degradations in the positioning accuracy could be observed, since the processing would be carried out in a single frequency instead of a double one;
- RTKLIB presented the alternative of using RTCM correction messages in processing, an option not available in GrafNet; and
- Due to the performance of a fast static tracking, GrafNet was several times unable to reach a solution of the ambiguity for the tracked points, presenting float messages and making it impossible to obtain the coordinates.
As for the processing itself, the clock and precise ephemeris data were acquired after three weeks of tracking, on the Crustal Dynamics Data Information System (CDDIS) website managed by the National Aeronautics and Space Administration (NASA). Data and reports from the RBMC stations close to the surveyed location, the National Observatory (ONRJ) and UFF (RJNI), were collected from the IBGE database.
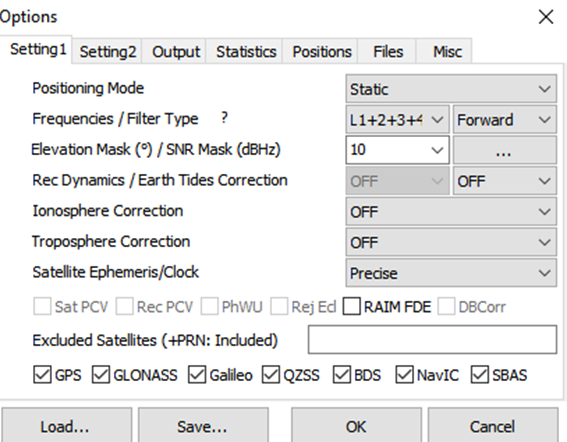
Regarding the settings used for processing, the standard used for both the smartphone observables and the Emlid RS2 tracker was a 10º elevation mask, static positioning mode, ionospheric and tropospheric corrections disabled, use of frequencies L1 to L5 in processing, and using observables from all currently available GNSS systems. In Fig. 5, the completed configuration window can be seen.
It should be noted that the processing was carried out with atmospheric corrections turned off, which is linked to the fact that the procedure was carried out with a linear combination of the observables between the two stations in double phase difference. This choice of combination generates a significant reduction in atmospheric effects, thus allowing the choice of performing the processing of the observables with the ionospheric and tropospheric corrections turned off, since the refraction problem is largely solved by the double phase difference.
Among the limitations presented by RTKLIB, there is the unavailability of processing adjustment for a 95 % confidence interval, which is possible in GrafNet.
3.2 Data analysis
With the purpose of analyzing the acquired and post-processed data, comparative tables were generated between the tracking performed by the cell phone and the collection of the Emlid RS2 tracker. In this way, the horizontal positioning could be framed in the types of tracking advocated and employed by the Brazilian Navy according to Technical Instruction D-02 (Determination of Coordinates by GNSS).
Given the wide dissemination in the academia, equality between the Datum WGS-84 and the Datum SIRGAS 2000 will be adopted, so the post-processed coordinates will be considered the same for both Datum, which will facilitate comparisons and calculations with the Description sheets Station (F-21) which are found in SIRGAS 2000. Thus, considering the above, the Plane Coordinate System UTM (Universal Transverse Mercator) and the Datum SIRGAS 2000 will be used in the preparation of this work from this point.
It should be noted that in order to verify the best solution for the problem of the absence of the navigation message in the tracking performed by the cell phone, data processing was also carried out using both the navigation message from the RBMC station of UFF (RJNI) and the National Observatory (ONRJ). Thus, we sought to resolve errors in the analysis of the acquired data.
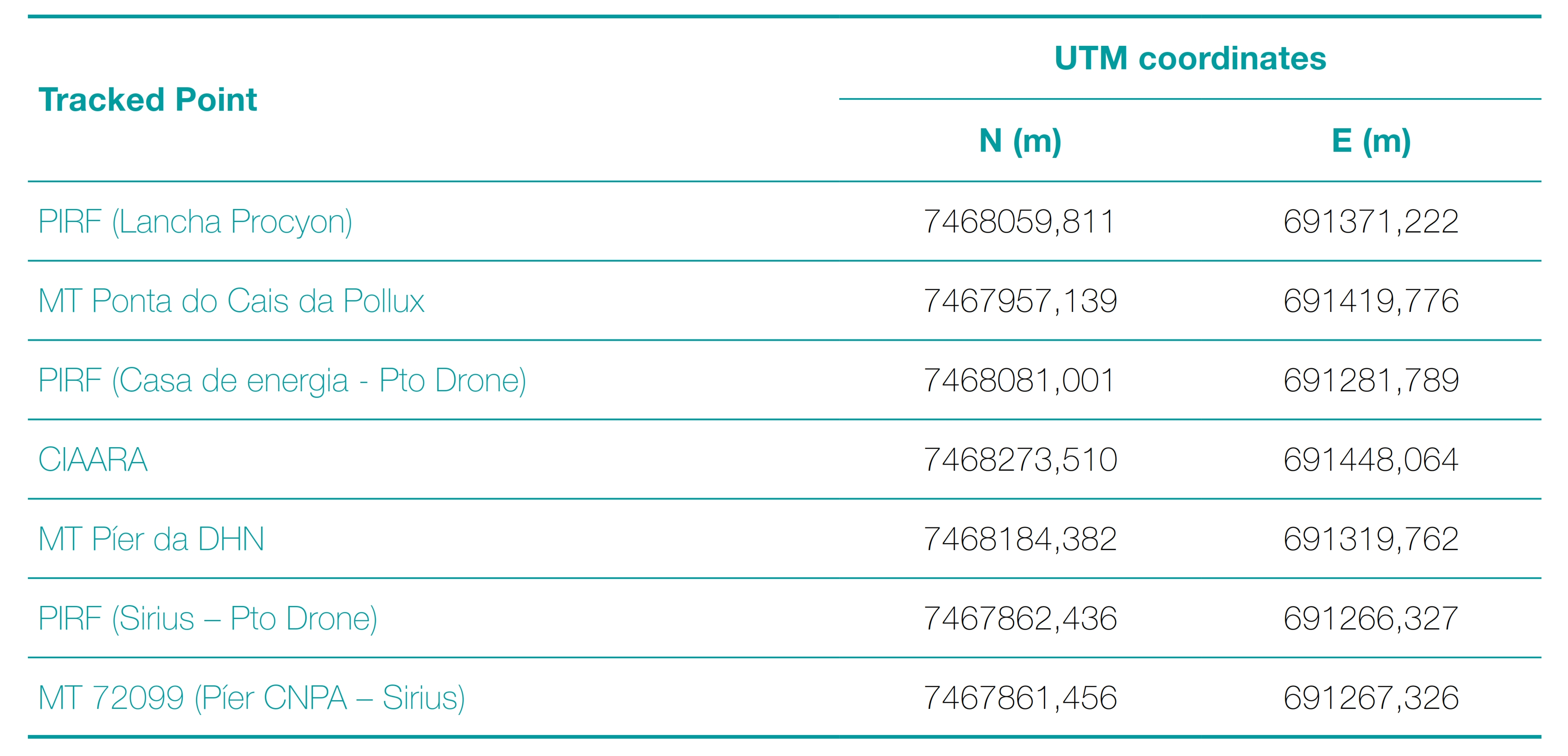
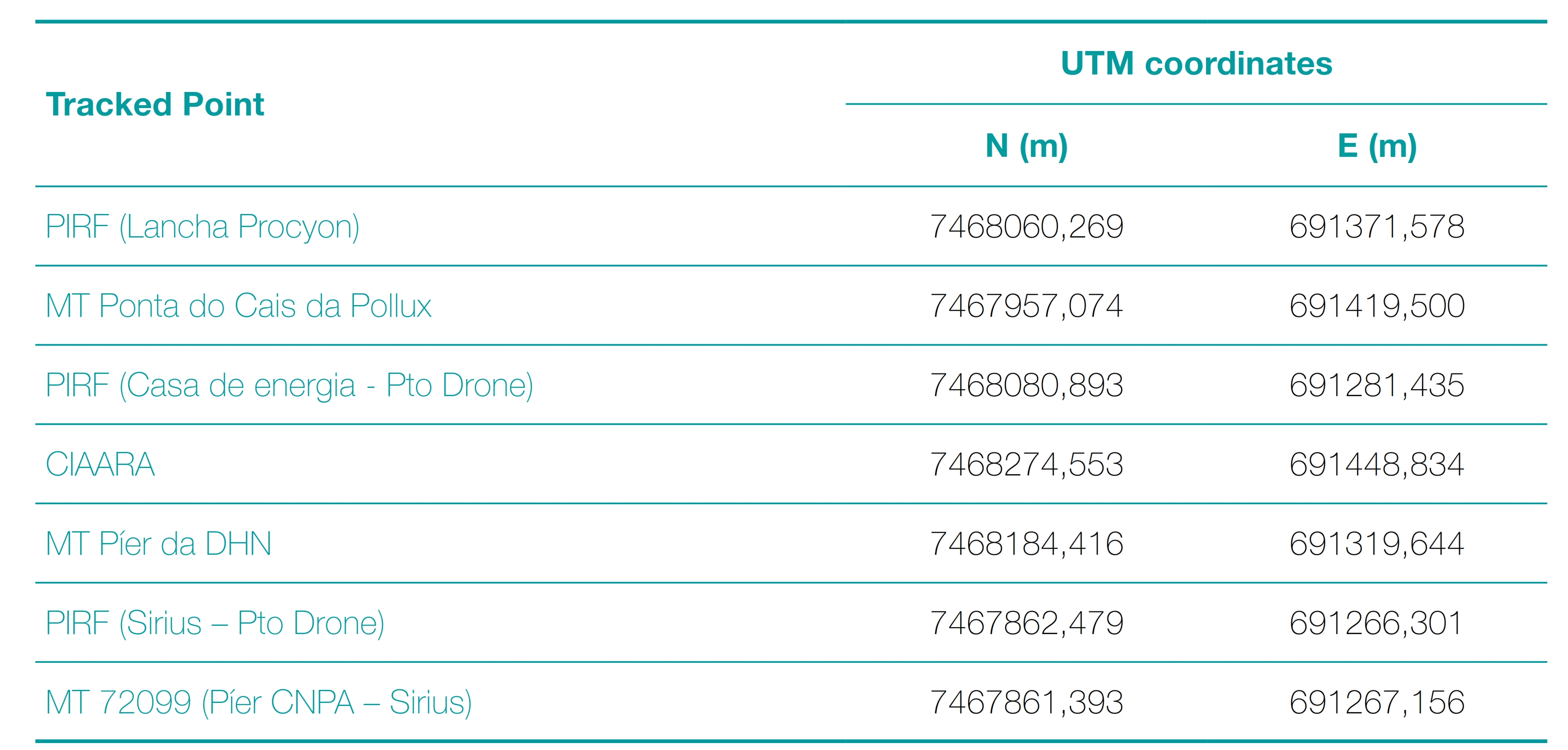
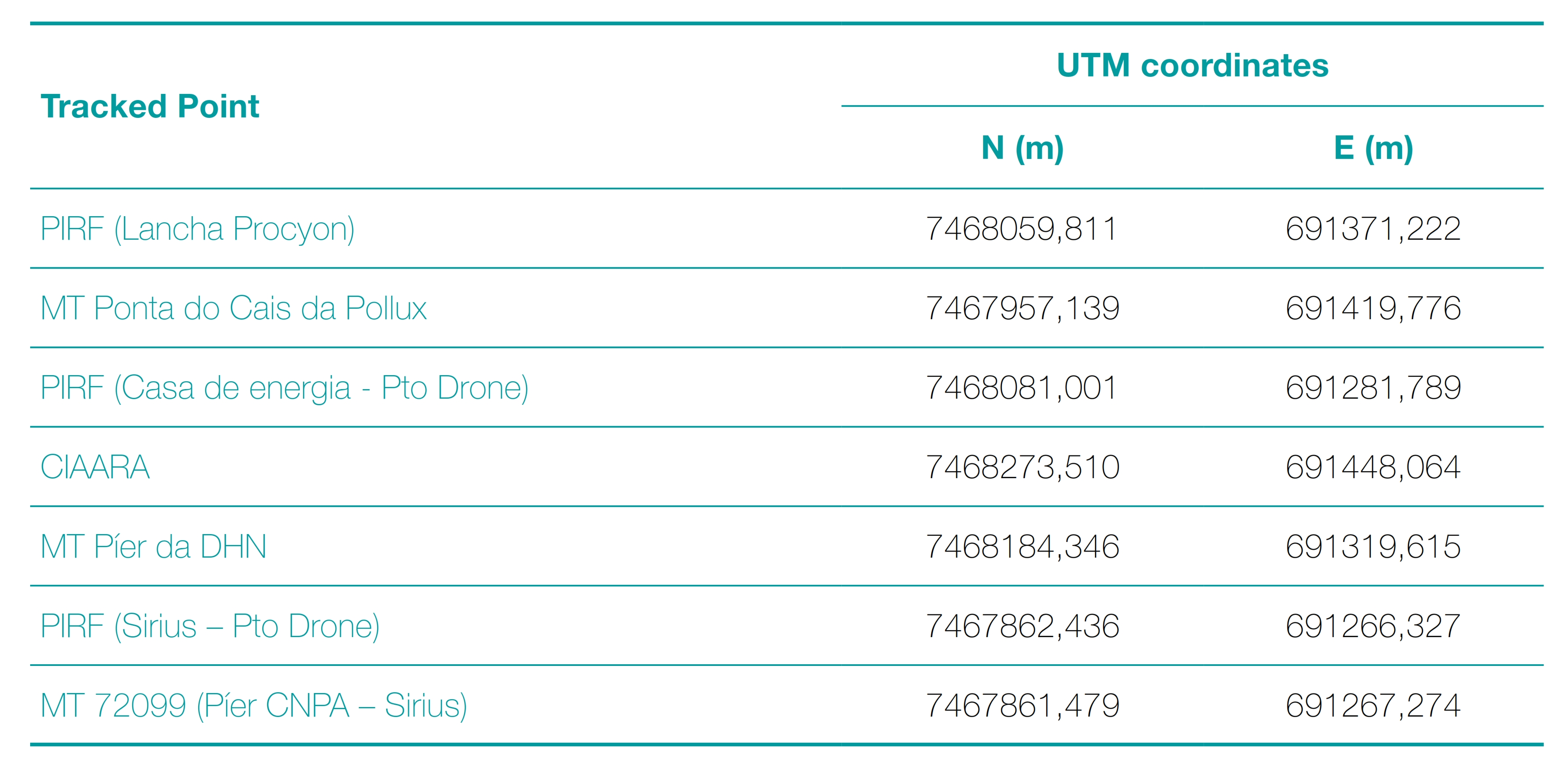
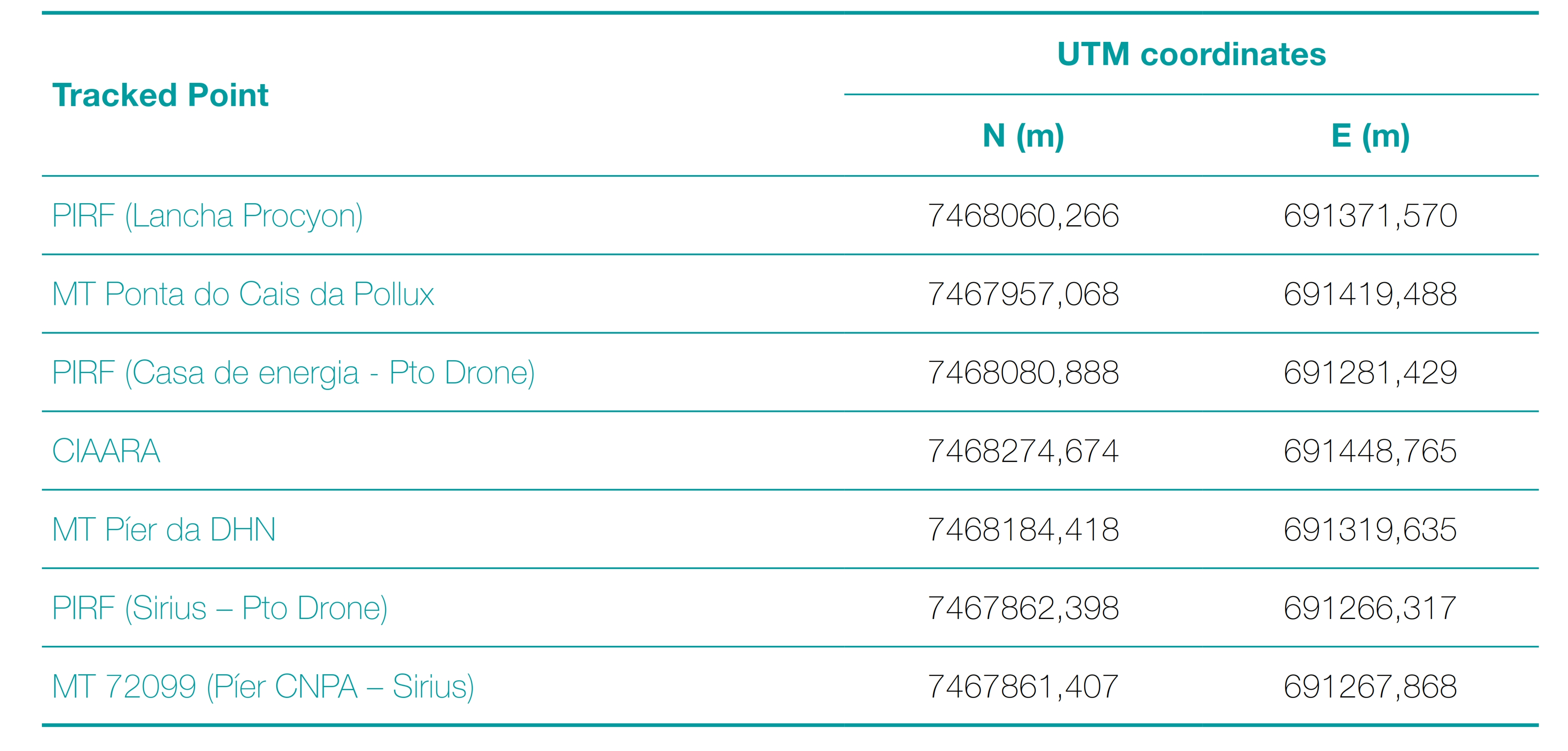
Tables 1 and 2 show the values of the coordinates obtained after processing the data collected by the smartphone, using the navigation message from the RBMC RJNI station, as well as those obtained by the Emlid RS2 tracker, with the RJNI station as a reference.
Tables 3 and 4 show the values of the coordinates obtained after processing the data collected by the smartphone, using the navigation message from the RBMC ONRJ station, as well as those obtained by the Emlid RS2 tracker, with the ONRJ station as a reference.
3.3 Precision and solution achieved by tracking
Among the most important parameters to evaluate the performance of a GNSS tracking, the following stand out: the evaluation of the final standard deviation for the North (N) and East (E) components and the ambiguity solution achieved. That is, in this way, it is possible to identify whether a tracking has suffered disturbances in the electromagnetic signal that, consequently, affected the precision of the final coordinates, as well as whether the time used for the activity was sufficient to solve the ambiguity problem. Tables 5 and 6 present the solutions achieved for the ambiguity problem and the standard deviation values at the end of the traces, which correspond to the respective uncertainty ellipses around the last coordinate of the post-processed point.
During processing, a trend of reduction of the standard deviation in both coordinates along the sections can be observed. This fact may indicate that the longer the cell phone tracking time, the better its accuracy. As for the ambiguity solution, it can be verified that in a few times it was possible to obtain a fixed solution. However, for those same instants, a large coordinate lag was observed in relation to the solutions generated both by the high-precision tracker, as well as those contained in the DHN Station Description Sheets (F-21). Furthermore, most of the time the float solution was obtained, including for the last coordinate generated in the processing. For these reasons, it was decided to conclude that the fixed solution to the ambiguity problem was not reached.
In Tables 7 and 8, the ambiguity solution values achieved in post-processing for each of the points are present, as well as the standard deviation values for the North (N) and East (E) coordinates. It should be noted that the first table contains information and values obtained using RJNI as a reference station, while the second table uses ONRJ.
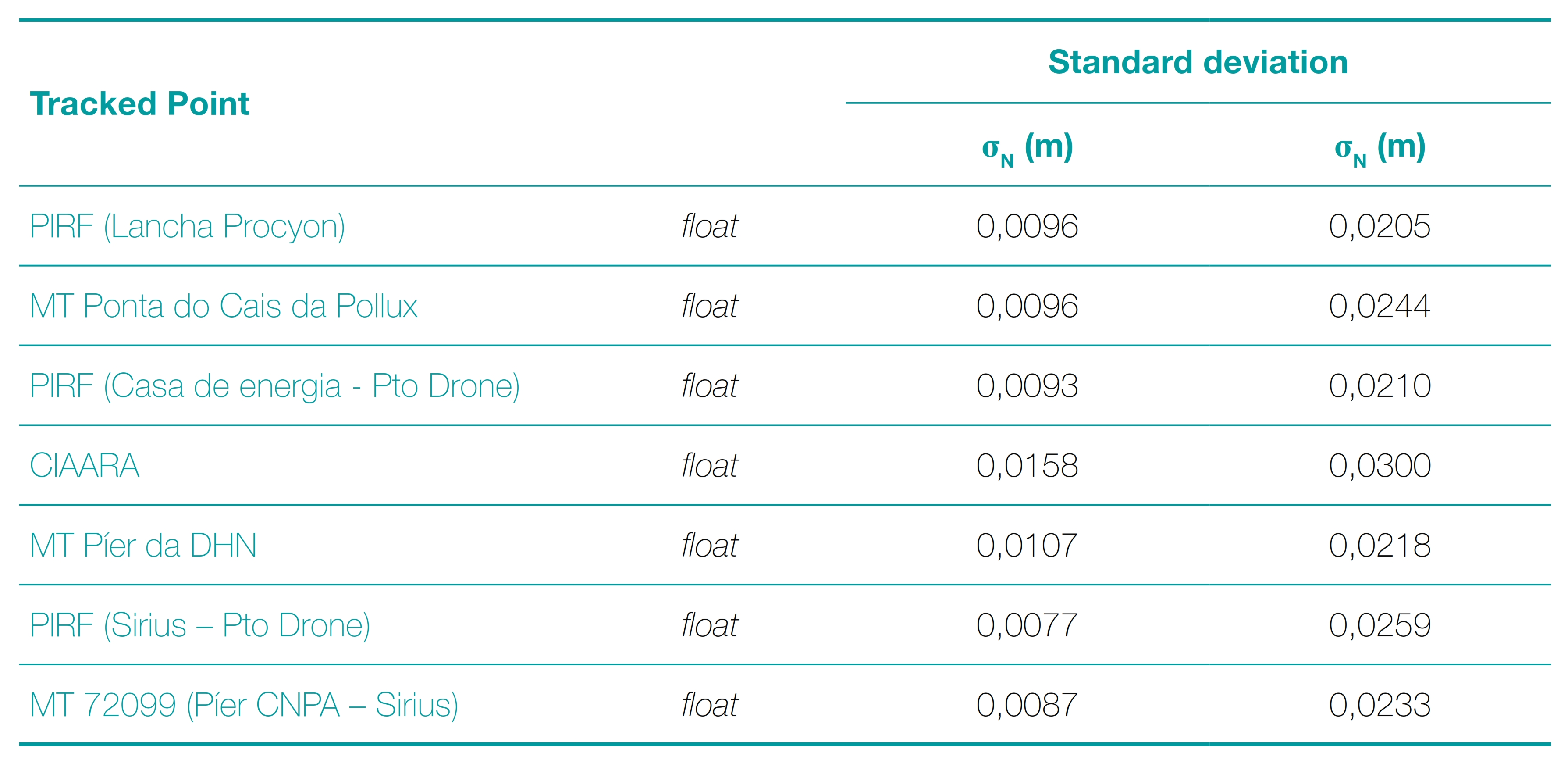
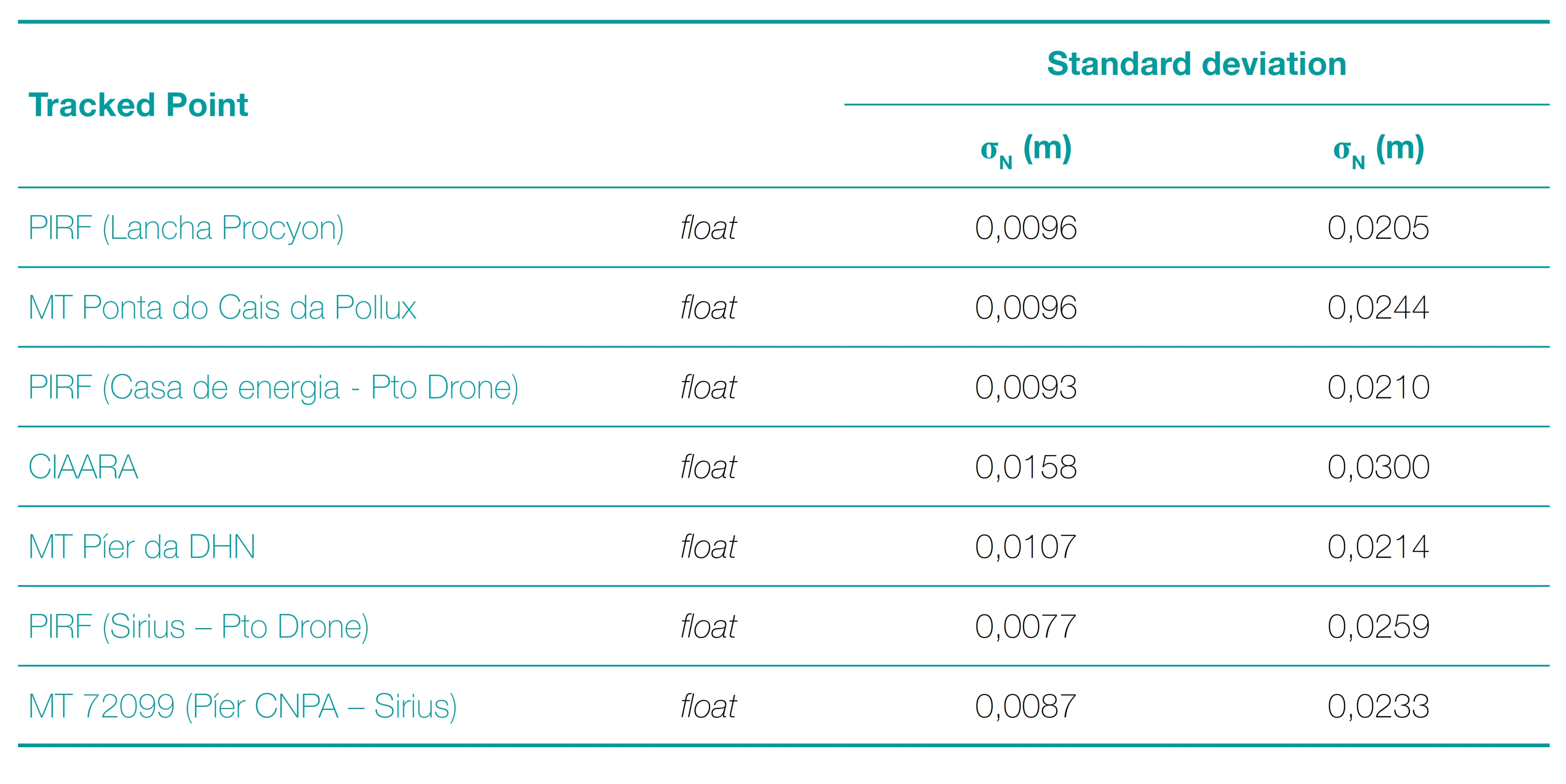
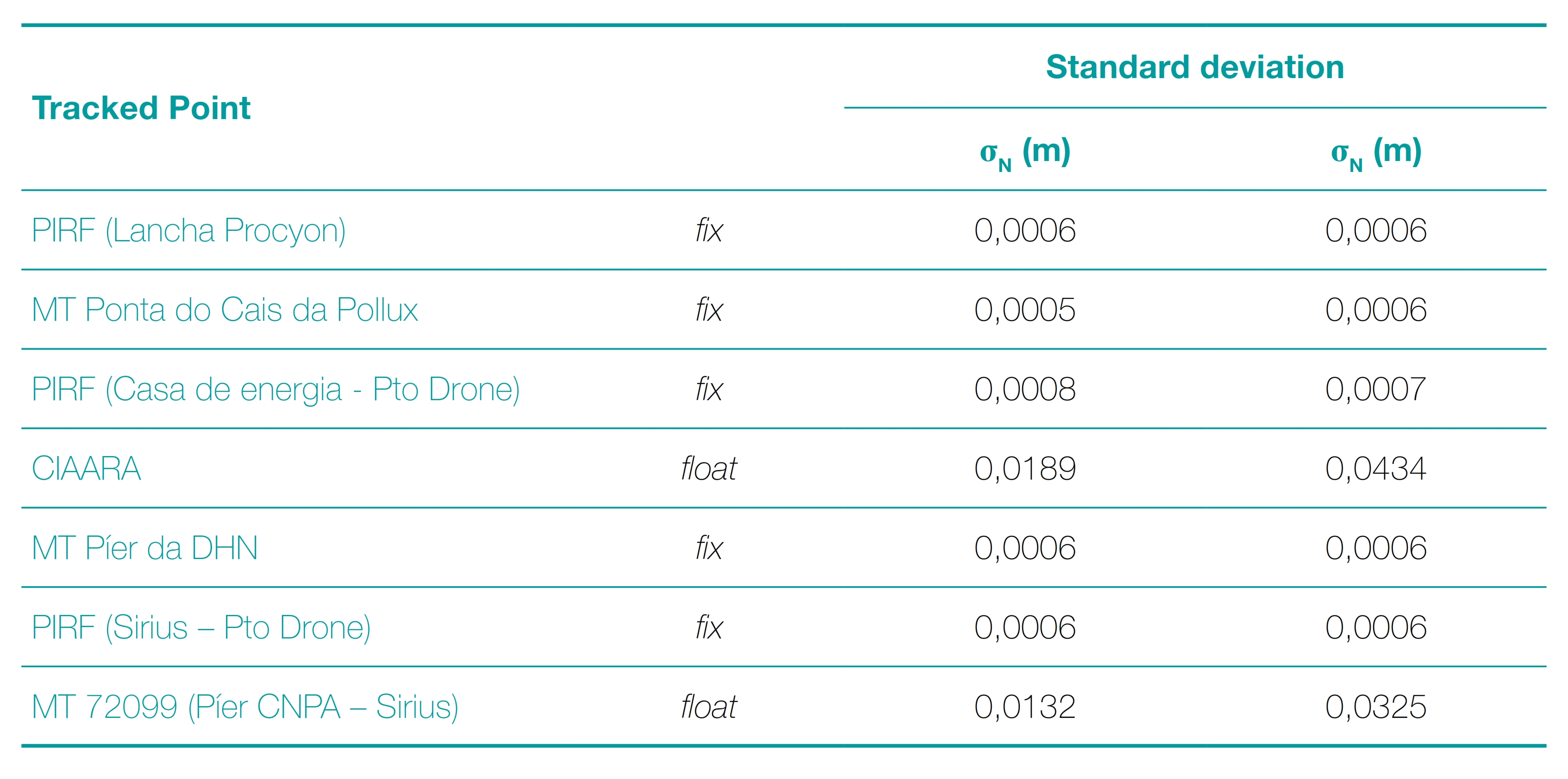
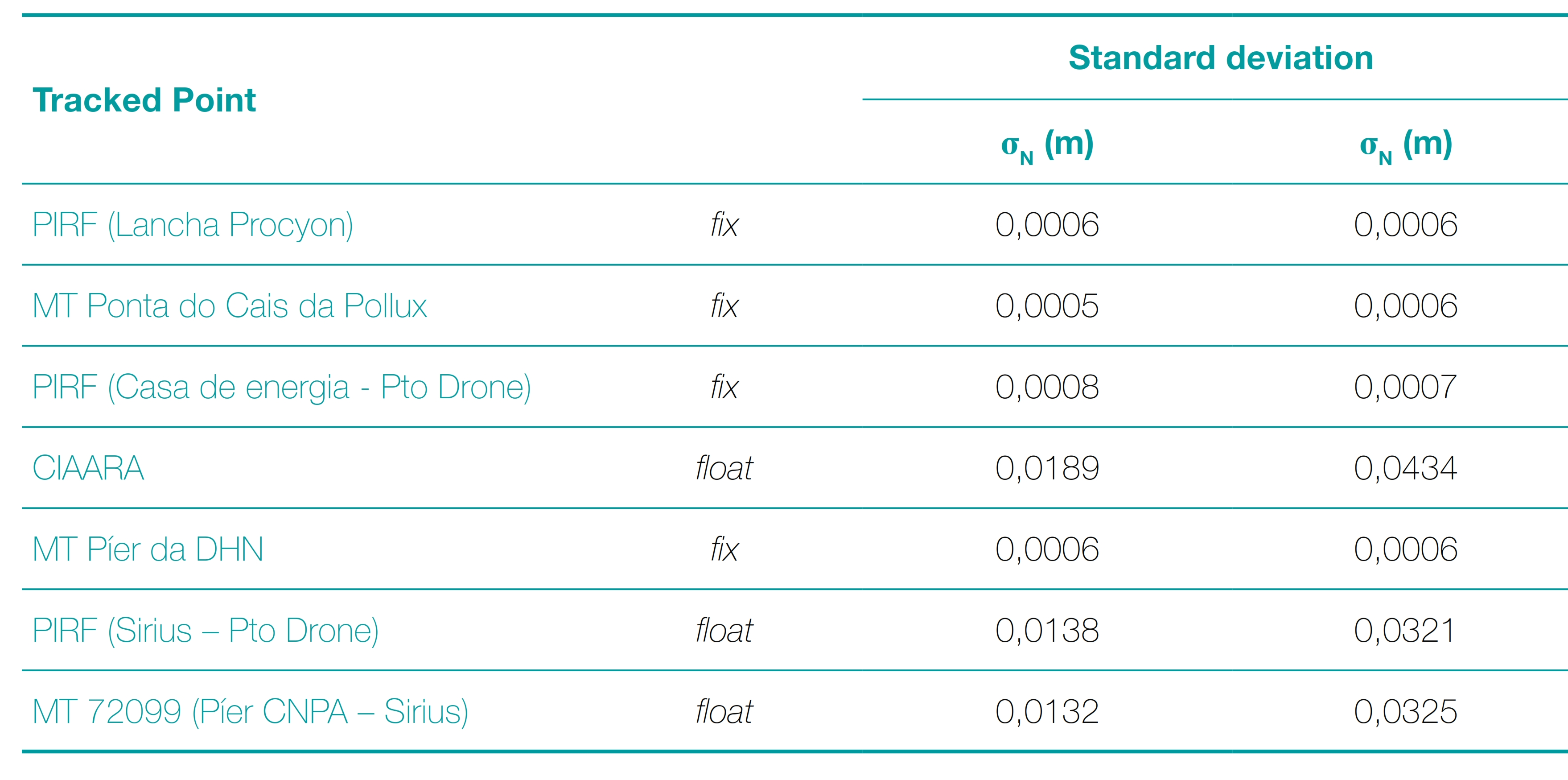
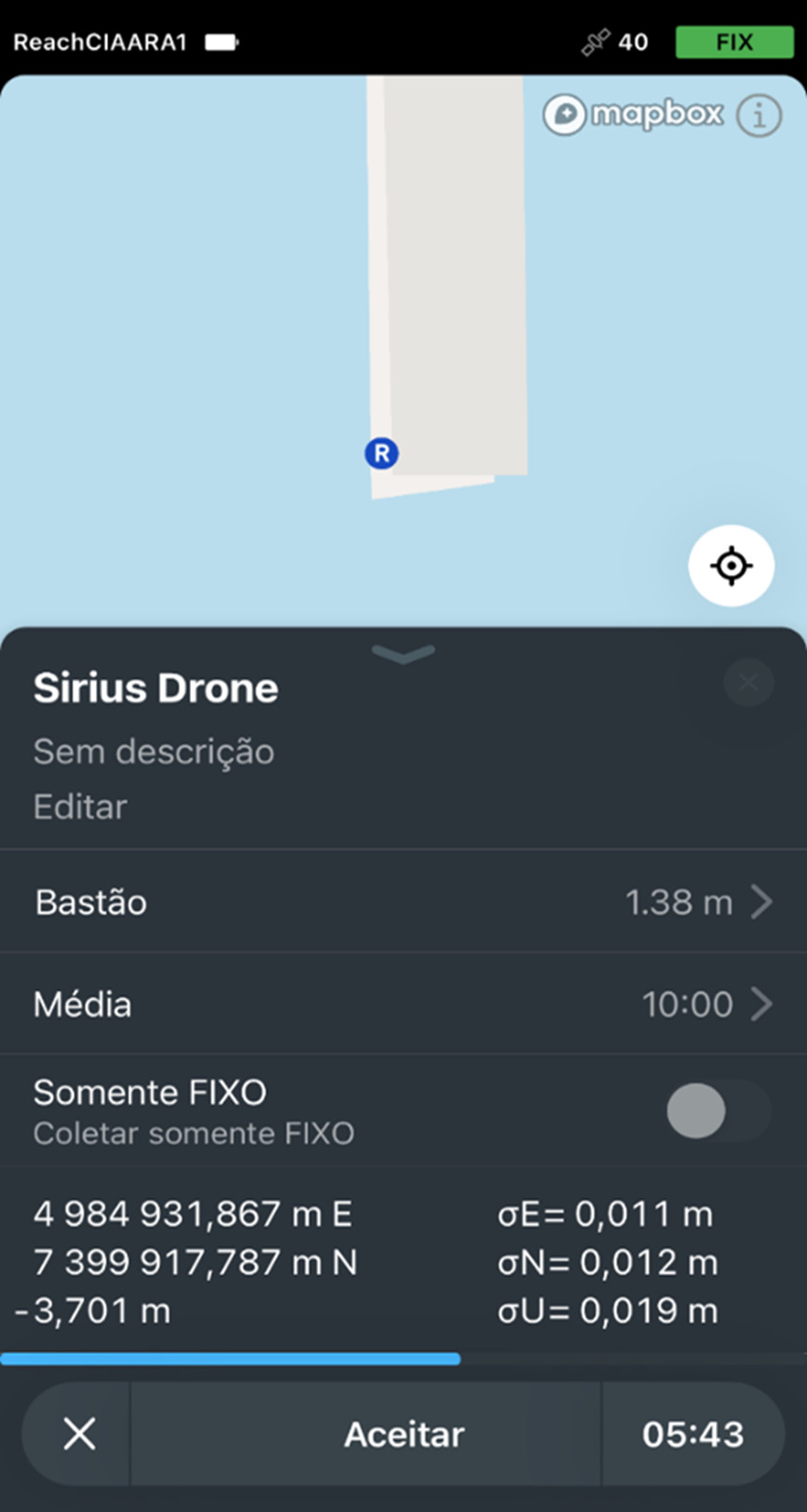
It can be seen from the tables that the seven points tracked, of which five for processing with a reference station in RJNI and four in ONRJ, presented fixed solutions (fix) and deviations in the millimeter, which infers the correct processing of the data by the RTKLIBR software. This can be proven once the tracking with the Emlid RS2 equipment was carried out receiving corrections via the NTRIP protocol. This resource allowed standard deviations in N and E varying between 0.010 m and 0.013 m throughout the procedure. Such information can be seen in Fig. 6, where there is an illustration of the cell phone screen during tracking of the PIRF (Sirius – Drone) point.
Likewise, it should be noted that due to the use of the RBMC-IP service, all points presented a fixed solution (fix) for the ambiguity at the tracking instants. However, during processing, some points presented a floating solution (float), due to some geographic and meteorological characteristics that hindered the tracking.
3.4 Analysis of tracked points
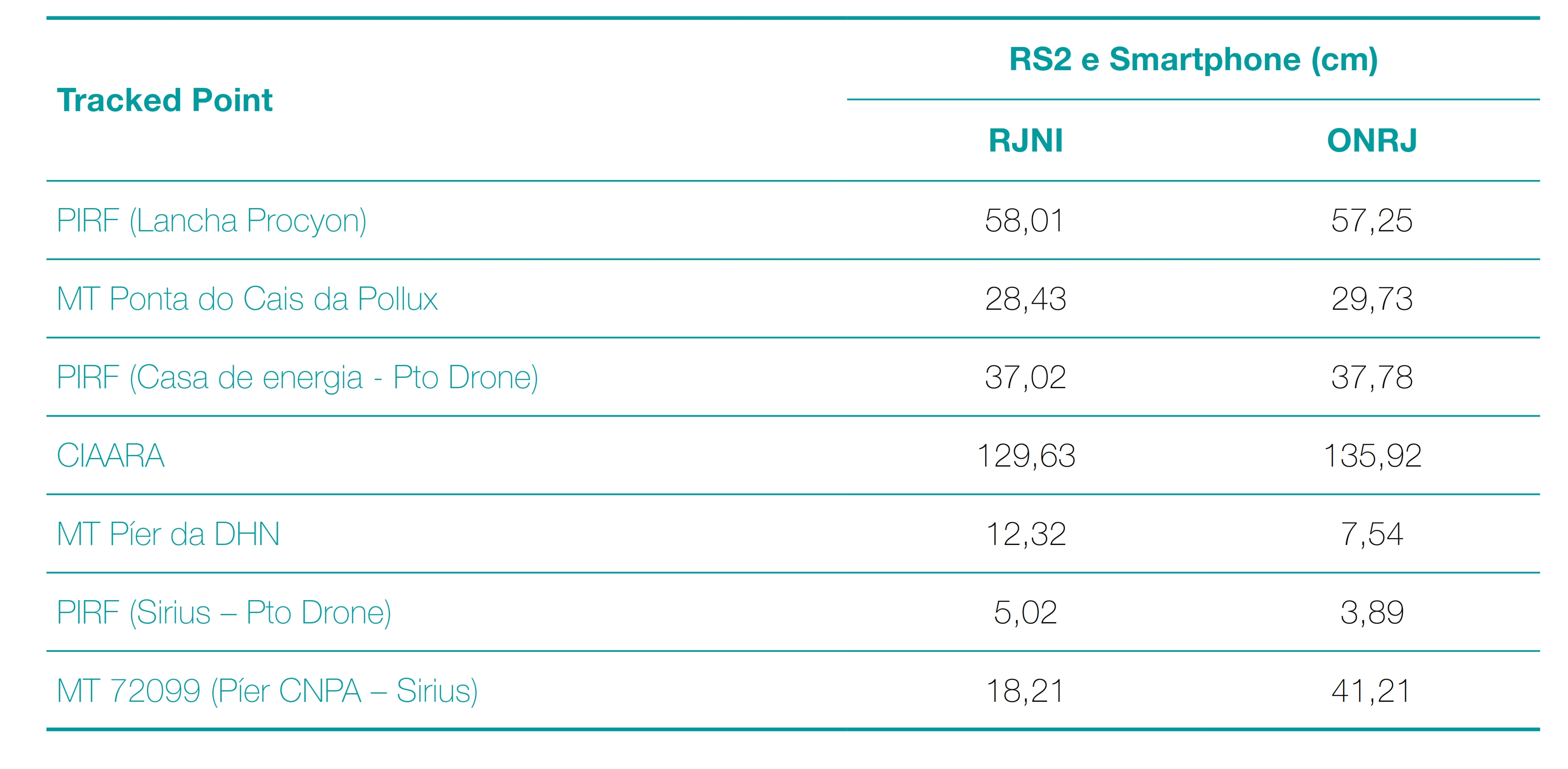
With the purpose of evaluating the work carried out and reaching conclusions about the use of GNSS receivers in smartphone as high-precision positioners, a comparative analysis of point-to-point coordinates between the values obtained or already existing in the F-21 was carried out. In this way, Table 9 presents the distance between the solutions found in the processing for the screenings carried out by smartphone and by Emlid RS2. Likewise, a comparison was also made between the collections carried out and the information contained in the Station Description forms (F-21), as shown in Table 10.
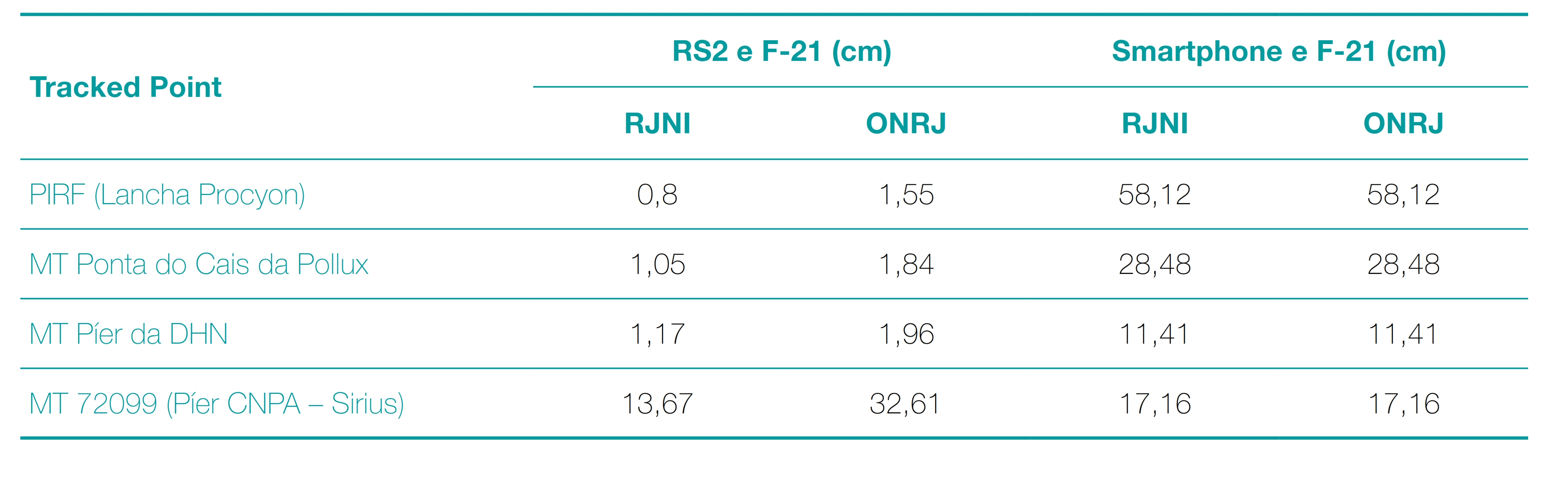
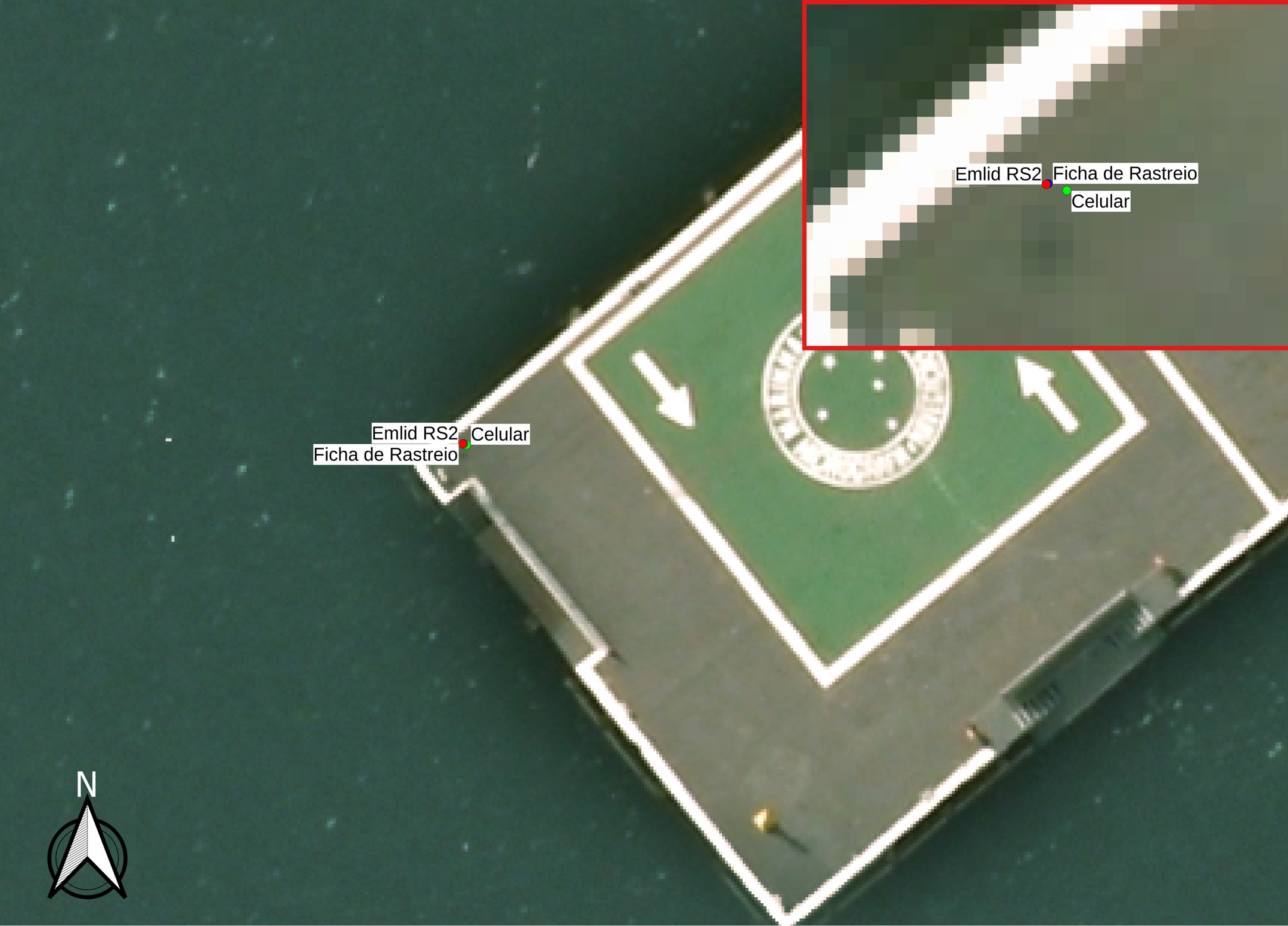
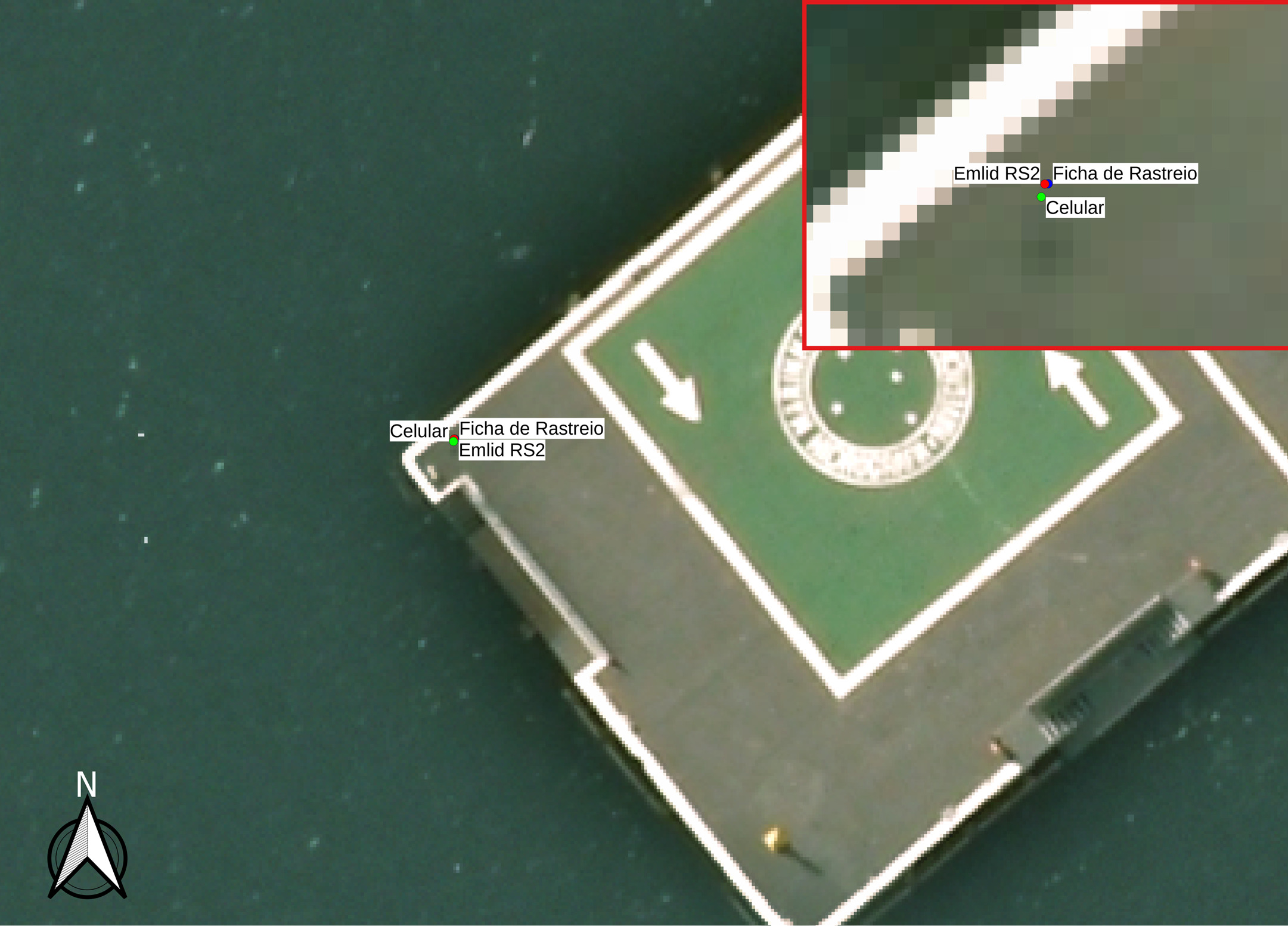
Each coordinate obtained by cell tracking and post-processed was plotted in the QGIS software, along with the post-processed coordinates of the Emlid RS2 tracker and the F-21.
In order to facilitate the understanding of the images contained in Figs. 7, 8, 9 and 10, the following aspects should be highlighted:
- The Coordinate Reference System (CRS) used in the georeferenced orthoimage was SIRGAS 2000, in the UTM projection zone 23S;
- The post-processed coordinates of the smartphone tracking are shown as green dots;
- The post-processed coordinates of the Emlid RS2 tracker are displayed as red dots;
- The coordinates of the F-21 are displayed as points in blue;
- The PIRF point (Sirius – Pto Drone) does not have an F-21 available. For this reason, only the coordinates coming from the smartphone and the Emlid RS2 are presented.


4 Conclusions and suggestions
According to the methodology used to evaluate the possibility of using GNSS receivers in cell phones as high-precision positioners, with the results achieved and based on the normative documents of the Brazilian Navy for the use of trackers in topogeodesic activities, it is concluded that:
- Although smartphones currently provide access to GNSS observables, their collection is affected by several sources of errors, since the antennas used in these devices are highly sensitive;
- Even with careful use during cell phone tracking, degradations in the accuracy of post-processed coordinates were still observed;
- Difficulties in obtaining the navigation message on the cell phone were overcome by using the message provided by the RBMC close to the tracking location;
- In possession of the post-processing results, a reduction in the uncertainty of the coordinates obtained with the smartphone can be observed when comparing the beginning and end sections of the tracking;
- Although the GNSS data processing software makes it possible to combine the L1 and L5 observables collected by the cell phone, it can still be observed that there is a loss of quality when compared with the data obtained by the high precision trackers;
- The rapid static tracking method proved to be unsatisfactory in terms of achieving the standards set out in Technical Instruction D-02 (Determination of Coordinates by GNSS) of the CHM; and
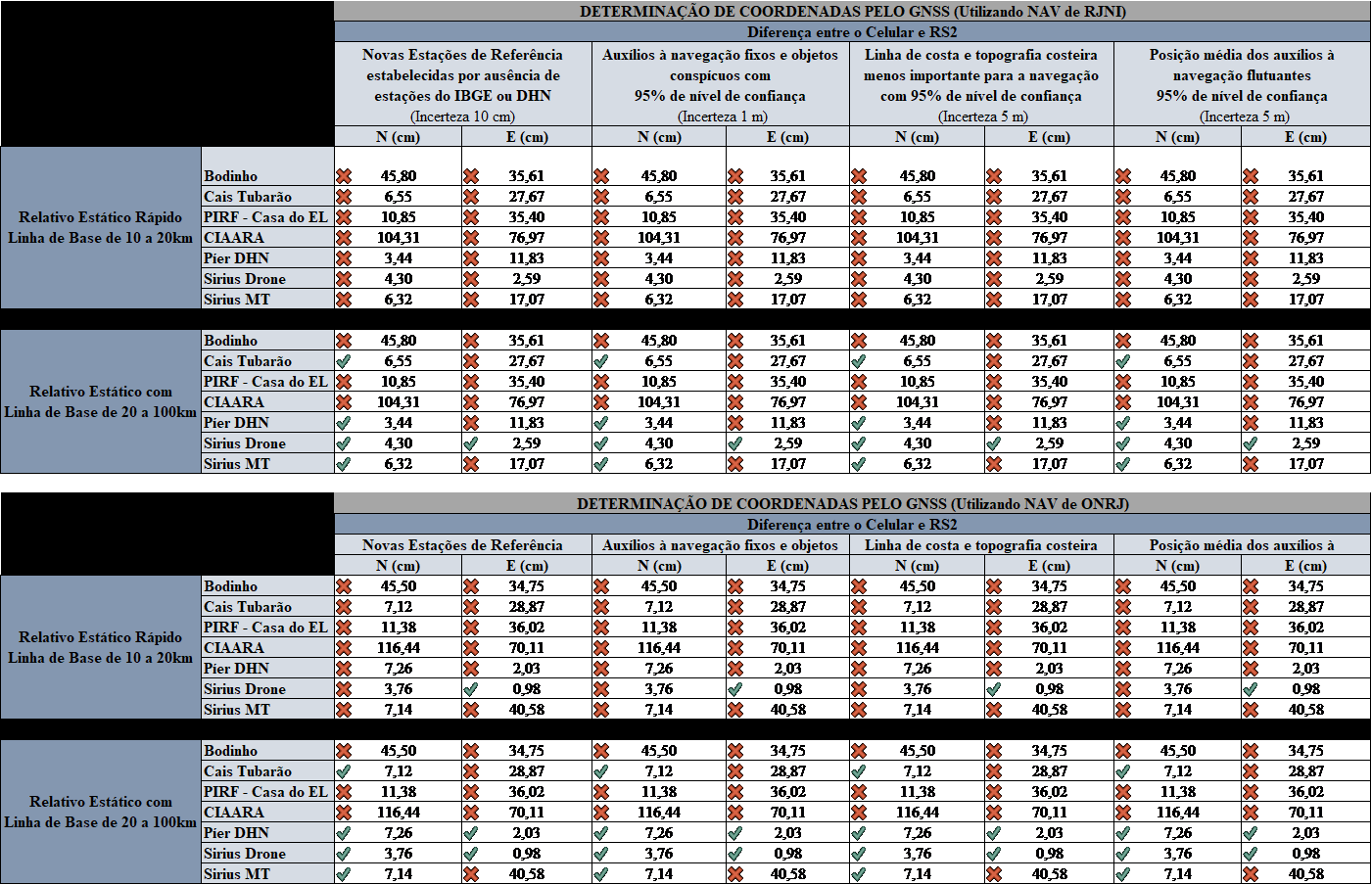
- Finally, the use of cell phones in place of precision trackers can be invalidated when analyzing the uncertainty and accuracy of the tracked points. This finding was achieved by taking the coordinates collected by the tracker as the reference information. Then, its corresponding uncertainty ellipse was plotted and it was verified whether the distance between the coordinates of the cell phone and the Emlid RS2 were greater than the maximum uncertainty allowed by the IT D-02. The values and comparisons can be observed in the tables contained in Fig. 11, where the ‘X’ symbol in red represents accuracy worse than uncertainty, while the correct symbol in green represents accuracy better than uncertainty.
Thus, it is emphasized that the use of GNSS receivers in cell phones as high-precision positioners does not meet the requirements recommended by the Brazilian Navy for carrying out topogeodesic work.
Nevertheless, it is suggested that in future works, studies be carried out with longer tracking periods, in order to verify the possibility of improvement in the quality of the data with the increase in the duration of the collect sessions, since a significant improvement in the precision and accuracy over tracking time.
References
Chen, R., Li, X. and Weber, G. (2004). Test Results of an Internet RTK System Based on the NTRIP Protocol. European Naviga-tion Conference GNSS, 21–24 September 2004, Rotterdam, Netherlands.
Costa, S. M. A., Lima, M. A. A., Moura Junior, N. J. de, Abreu, M. A., da Silva, A. L. and Fortes, L. P. S., (2008). RBMC em tempo real, via NTRIP, e seus benefícios nos levantamentos RTK e DGPS. Simpósio Brasileiro de Ciências Geodésicas e Tecnologias da Geoinformação, 8–11 September 2008, Recife, Brasil.
IBGE (2008). Recomendações para Levantamentos Relativos Estáticos – GPS. Rio de Janeiro: IBGE. https://geoftp.ibge.gov. br/metodos_e_outros_documentos_de_referencia/normas/ recom_gps_internet.pdf (accessed 3 Oct. 2023).
IBGE (2022). Atlas Escolar, GNSS. IBGE. https://atlasescolar.ibge. gov.br/conceitos-gerais/o-que-e-cartografia/sistema-globalde-navegac-a-o-por-sate-litess.html (accessed 22 April 2022).
Leick, A., Rapoport, L. and Tatarnikov, D. (2015). GPS Satellite Surveying (4th ed.). Hoboken: John Wiley & Sons.
Lenz, E., (2004). Networked Transport of RTCM via Internet Protocol (NTRIP) – Application and Benefit in Modern Survey Systems. FIG Working Week, 22–27 May 2004, Atenas, Greece.
Negri, C. V. C. (2018). Estimativa das Observáveis GPS da Portadora L2 por Meio de Redes Neurais Artificiais a partir de Dados Obtidos em Dispositivos Móveis. Master’s degree, Universidade de São Paulo.
Segantine, P. C. L., (2005). GPS: Sistema de Posicionamento Global. São Carlos: EESC/USP
Weber, G., Dettmering, D. and Gebhard, H. (2005). Networked Transport of RTCM via Internet Protocol (NTRIP). In Sanso, F. (Ed.), A Window on the Future of Geodesy. International Association of Geodesy Symposia, Springer Berlin Heidelberg.
- The static tracking with the smartphone took place in the afternoon of July 28, 2022. The telephone device continued collecting data uninterruptedly for 10 minutes with a sampling frequency of 1 second. Throughout the entire track, the weather was sunny with clear skies and moderate winds.
- The static tracking with the Emlid RS2 took place in the afternoon of July 29th and August 1st, 2022. The tracker continued collecting data uninterruptedly for 10 minutes with a sampling frequency of 5 seconds. Throughout the entire survey, the weather was sunny with clear skies, but it should be noted that at the end of the survey on the 29th, there was an increase in wind intensity due to the approach of a cold front in the region.